收藏
收藏 已收藏
已收藏英文名称 :congenital talipes equinovarus;congenital clubfoot
先天性马蹄内翻足(congenital talipes equinovarus,CTEV或congenital clubfoot,CCF)是一种常见畸形,主要表现为足的跖屈、内翻、内收和高弓畸形(图1),部分病例同时伴有胫骨内旋畸形。出生后可立即被发现,因而诊断并不困难。随着超声影像技术的发展,产前诊断也成为可能。有报道,其发病率在某些种族和地域很低,为0.6‰,而在其他的种族和地域较高,可达6.8‰。马蹄内翻足是不能自行纠正的。目前对该病的原则性共识是,如能早期适当处理,大多可获良好的畸形矫正和功能结果;如不治疗,则将终生残疾,影响生活和工作(图2)。

图1 先天性马蹄内翻足外观表现
A.跖屈畸形;B.内翻畸形;C.内收畸形;D.高弓畸形

图2 先天性马蹄内翻足未经治疗、成年后的外观表现
先天性马蹄内翻足,依其发病的相关因素可分为四种类型:①特发型,病因尚不很清楚,是单纯的骨骼肌肉系统畸形,仅累及膝以远的骨骼肌肉组织;②体位型,多表现为柔软的畸形;③神经肌肉型,与神经肌肉疾患相关的足踝畸形,如脊髓脊膜膨出伴发马蹄内翻足畸形;④综合征型,伴随其他已知综合征出现的足踝畸形,如多关节挛缩伴发的马蹄内翻足畸形。特发型马蹄内翻足最常见,学术界讨论的马蹄内翻足主要是针对 特发型马蹄内翻足(idiopathic clubfoot),即仅有马蹄内翻足畸形而不伴有其他畸形,不包括那些已知病因及作为综合征一部分的马蹄内翻足畸形的病例。该类型马蹄内翻足,男性多于女性,双侧多于单侧。部分病例有家族史。
目前该病的病因尚不清楚,包括环境和遗传两方面因素的共同作用。近来的研究试图用多基因的阈值模型解释其病因。一些研究结果表明,患儿出生季节、受孕月份与马蹄内翻足的发生有关。中国出生缺陷监测中心对全国500多所医院连续5年的监测结果分析发现,特发性马蹄内翻足的发生率存在季节性波动,发生高峰在冬季,主要在每年的1月份。季节性波动反映了环境因素对该病发生的影响。特发性马蹄内翻足发生的一个特点是在性别上存在差异,男女发生率之比约为2.5∶1,而且累及双侧略多于单侧。
足与小腿远端结合部位构成踝关节,担负着下肢的承载功能。对足和踝的基本结构和功能要求是:有力量,能踏平,活动度好,无疼痛,能穿正常的鞋。足由七块跗骨以及五块跖骨和远侧相应的趾骨组成,跗骨包括距骨、跟骨、舟骨、骰骨、第一、二、三楔状骨。踝关节由距骨和胫、腓骨的远端组成。踝关节的运动主要为跖屈和背伸活动,参与跖屈的肌肉有小腿三头肌、腓骨长肌、腓骨短肌、趾长屈肌和胫骨后肌,参与背伸的肌肉有胫骨前肌、趾长伸肌和𧿹长伸肌。根据解剖部位将足分为前足、中足和后足三段,前足包括五块跖骨和远侧相应的趾骨,中足包括舟骨、骰骨和第一、二、三楔状骨,后足包括距骨和跟骨(图3)。跗骨呈空间排列,相互间构成关节,这些关节在足的运动学方面发挥重要作用。距骨下方的中足和足跟的运动主要是由距跟关节、距跟舟关节、跟骰关节这三个跗骨间关节联合作用来完成,但该运动还有舟骰关节、骰外侧楔关节、舟楔关节、楔骨间关节等其他骨关节的参与。
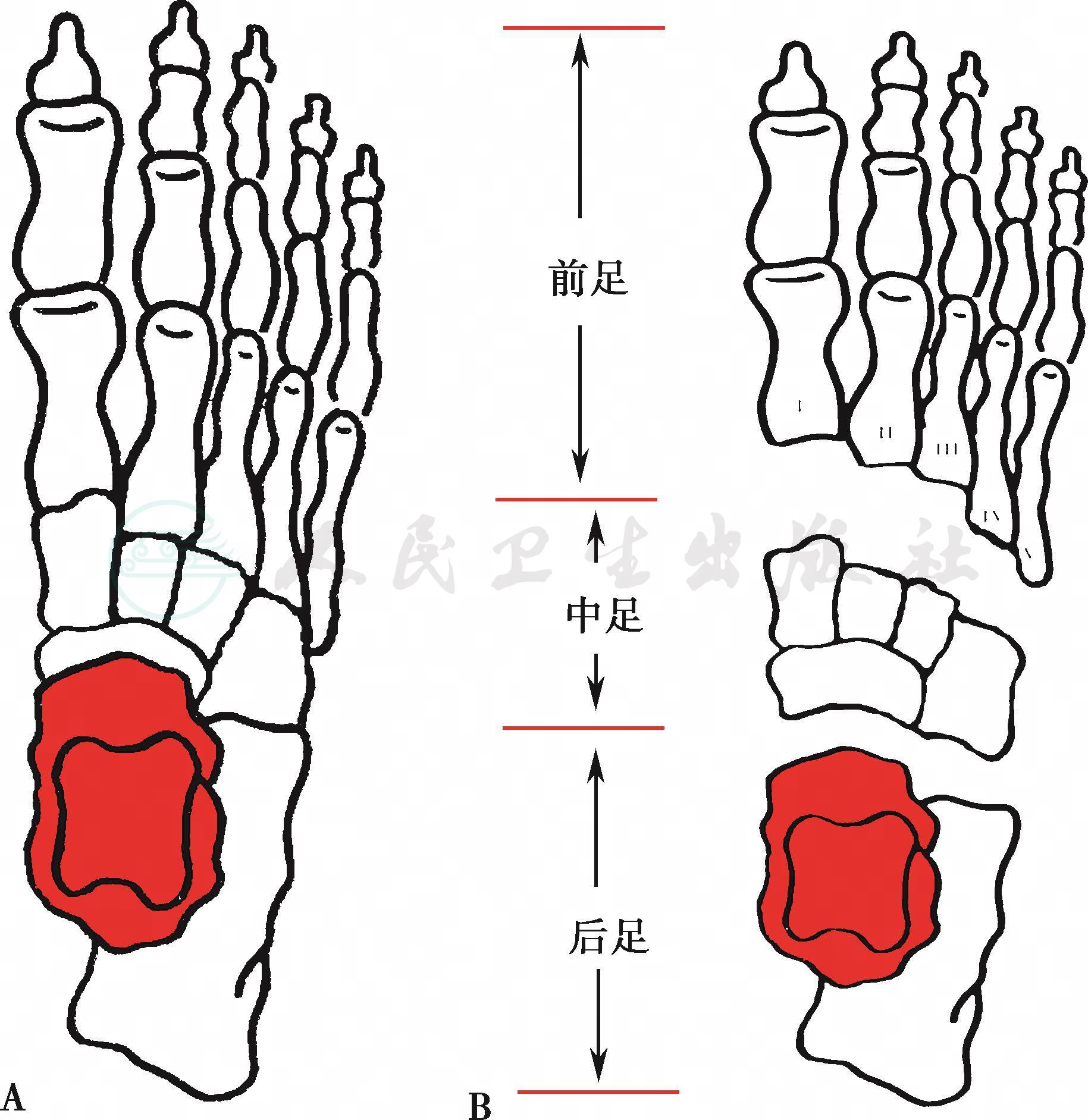
图3 俯视位足骨解剖示意图
A.足骨间的对应和排列关系(红色部分为距骨);B.根据解剖部位将足分为前足、中足和后足三段
在功能上,所有跗骨作为一个整体完成某一特定的活动。很多肌肉在空间上参与了跗骨的运动,主要包括胫骨后肌、胫骨前肌、腓骨长肌、𧿹长屈肌和趾长屈肌。这些肌肉也对足弓的维持有重要作用。七块跗骨之间有着非常复杂的结构关系,其在运动学上是相互耦合的。一旦一个关节发生运动,其他关节也随即发生相应的运动,中足的运动总是和足跟的运动耦合。如中足内翻是跖屈、内收和旋后的耦合运动,同时足跟也相应发生内翻;中足外翻是背伸、外展和旋前的耦合运动,同时足跟也相应发生外翻。我们注意到的有趣的现象是:当中足转到内翻位的时候,足跟会自动转到内翻位;当中足转到外翻位的时候,足跟会自动转到外翻位(图4)。

图4 足跗骨间的耦合运动(Kinematic Coupling)演示图
A、B.骨骼模型和在体演示中足内翻是跖屈、内收和旋后的耦合运动,同时足跟也相应发生内翻;C、D.骨骼模型和在体演示中足外翻是背伸、外展和旋前的耦合运动,同时足跟也相应发生外翻
CTEV的病理累及软组织与骨软骨组织,甚至包括小腿软组织的发育异常。两者何为原发,何为继发,尚有争论。一种观点认为,初生婴儿大多只有软组织改变而骨关节正常或仅有轻微改变,但随着年龄增长,其软组织与骨骼病变可进行性加重。另一种观点认为,骨骼特别是距骨的畸形是该病的主要病理特征。
如图5所示,CTEV的病理改变主要包括跗骨形态和跗骨间对应关系的异常以及周围软组织的异常。跖屈畸形是由胫距关节的跖屈和跟骨的跖屈形成的,内翻畸形是由跟骨的内收形成的,内收畸形包括舟骨和骰骨向内侧移位、跟骨远端关节面的内收以及距骨颈的内倾等异常结构因素,高弓畸形主要是由第一跖骨屈曲形成的,各跗骨均发生一定程度的变形,以舟骨变形为明显。软组织也存在异常,如关节囊发生挛缩,跟舟足底韧带、胫后肌腱、跟腱、趾长屈肌腱、𧿹长屈肌腱、跖腱膜、跖短肌、腱鞘和距跟间韧带也发生挛缩。
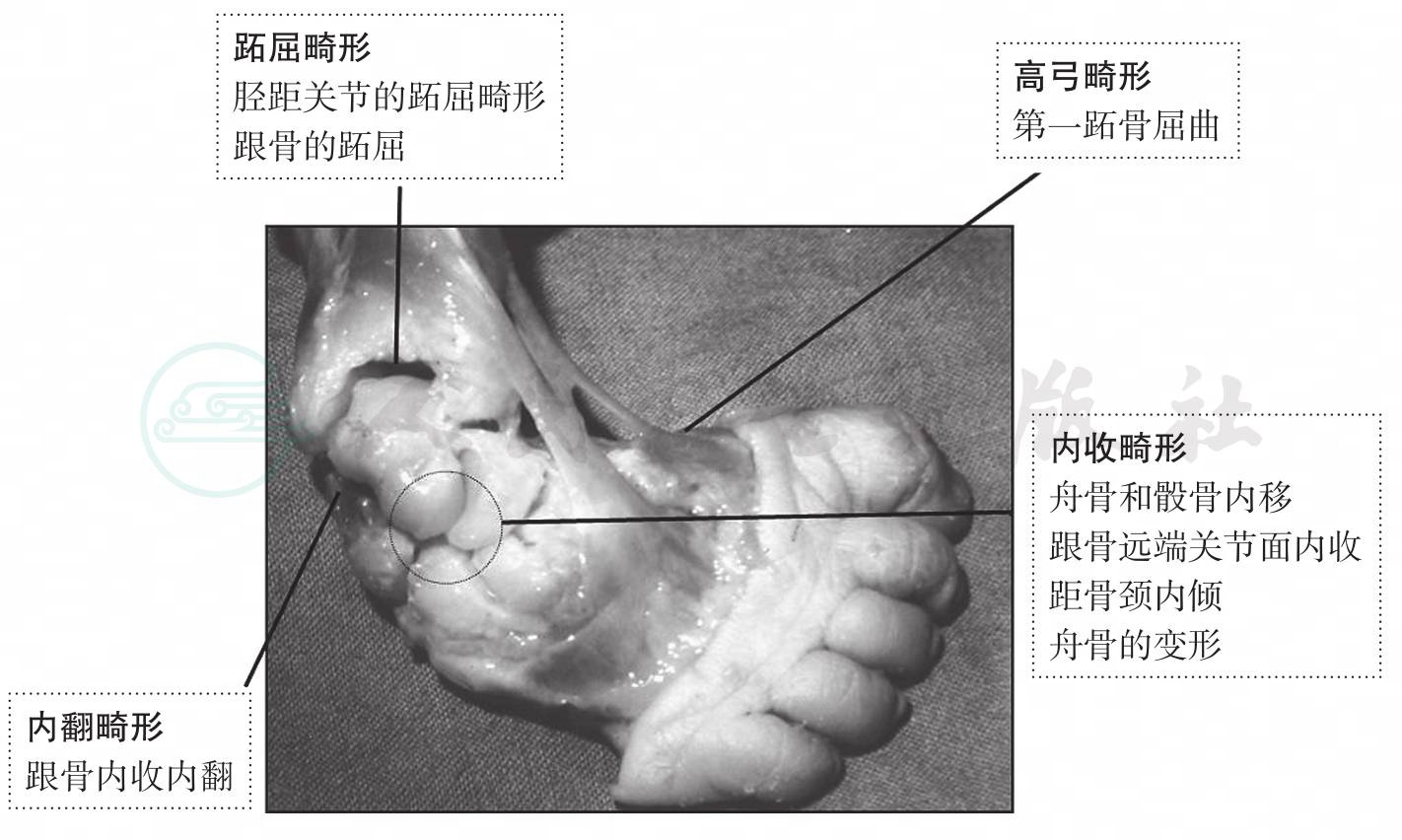
图5 CTEV的解剖标本显示跗骨形态和跗骨间对应关系的异常以及周围软组织的异常
CTEV治疗的目标是期望尽可能获得并保持足踝部的正常结构和功能。但患者及家属必须理解,就治疗和研究现状来看,无论如何,经过矫治的马蹄内翻足也不会成为真正意义上的正常的足。目前已达成的共识是,CTEV治疗越早预后越好,应在出生后即开始进行,早期治疗应首先考虑非手术治疗。
(一)非手术治疗
几乎所有的骨科医师都认为,CTEV的最初治疗应该是非手术治疗。新生儿时期是治疗CTEV的最佳时机,这既是由于新生儿期足踝部有相对较好的弹性,也由于从某种程度说可以减少外固定所带来的肌肉萎缩和关节僵硬。支持非手术治疗的学者认为,这应该是必须采取的方法,纠正畸形,即便是手术不可避免,通过非手术治疗也可以减轻畸形程度和减小手术范围。在新生儿时期即行手术治疗的病例,结果往往是瘢痕较多和足较僵硬。非手术治疗是逐渐纠正畸形,而不产生瘢痕。
目前非手术治疗主要包括法国功能疗法和Ponseti方法。过去十几年来,Ponseti方法得到较为广泛的接受,尤其是在婴幼儿期开始治疗,许多报道畸形初期矫正率接近100%,引起了治疗理念上的重大改变。Ponseti方法是以20世纪40年代后期首先介绍和使用该方法的Ponseti医生来命名的,该方法概括起来主要包括:早期连续石膏矫形加经皮跟腱切断术,辅以足外展矫形支具维持获得的矫正。通过同时矫正马蹄内翻足的所有畸形因素,Ponseti的方法在获得畸形矫正方面更为有效。这是基于对如下问题的认识:①对畸形病理和自然病程的理解;②组织受到有控制的机械应力后产生再生的反应;③足踝的功能解剖,尤其是跗骨间的运动耦合原理。Ponseti认识到可以通过外展前足的同时就使跟骨的内翻畸形得以矫正。另外,Ponseti强调了纠正足弓的重要性和纠正足弓的方法,而并不需要特别矫正跟骨。
组织学研究发现,新生儿韧带中富含胶原纤维和细胞,成束的胶原纤维呈现波纹状皱折,这种皱折容许韧带被牵拉。Ponseti认为对婴儿韧带的缓慢牵拉不会引起任何损害,停歇数日后皱折会重新出现,允许进一步被牵拉。因为新生结缔组织、软骨和骨骼的特性,每次更换石膏时,胶原纤维松弛,在不刺激引起纤维化反应的基础上,骨骼和相关软组织的形态结构随着应力作用时间的推移而发生适应性的改变,即骨骼和关节重新塑型。
纠正跗骨间的畸形是纠正CTEV的基本要素,Ponseti找到了有效纠正跗骨间畸形的正确方法。如图6所示,复位的手法包括稳定距骨头,抬高第一列(又称为足的旋后),纠正高弓,然后将足外展,这是一个连贯的操作动作。距骨头是所有矫形的支点,将距骨头稳定后,除踝关节的跖屈外,马蹄足的所有畸形都随着足的外展同时得到矫正。一般通过4~5次逐渐矫形的石膏,畸形可完全矫正。良好塑形的石膏技术在Ponseti方法中受到特别的强调(图7)。随着内收和内翻的矫正,跖屈逐渐得到改善。

图6 马蹄内翻足畸形骨骼模型演示Ponseti方法的手法操作,上方箭头提示固定距骨头,距骨头是所有矫形的支点,下方箭头提示抬高第一列纠正高弓畸形同时做足的外展

图7 先天性马蹄内翻足Ponseti治疗法中所使用的连续矫形石膏
按照上述的技术细节纠正跗间关节的畸形,然后用良好塑形的石膏将足保持在矫正的位置。对韧带的牵拉不应超过自然允许的量(临床上多以在患者安静的条件下操作时,手法矫形不引起患者挣扎或哭闹为宜),5~7天后可再次牵拉达到更大的矫正角度。因为新生结缔组织、软骨和骨骼的特性,每次更换石膏时,骨骼和关节都会被再次塑形,这是骨软骨对机械性刺激的反应。Pirani等通过石膏固定前、中、后MRI影像资料的比较,对复位过程进行了演示(图8)。
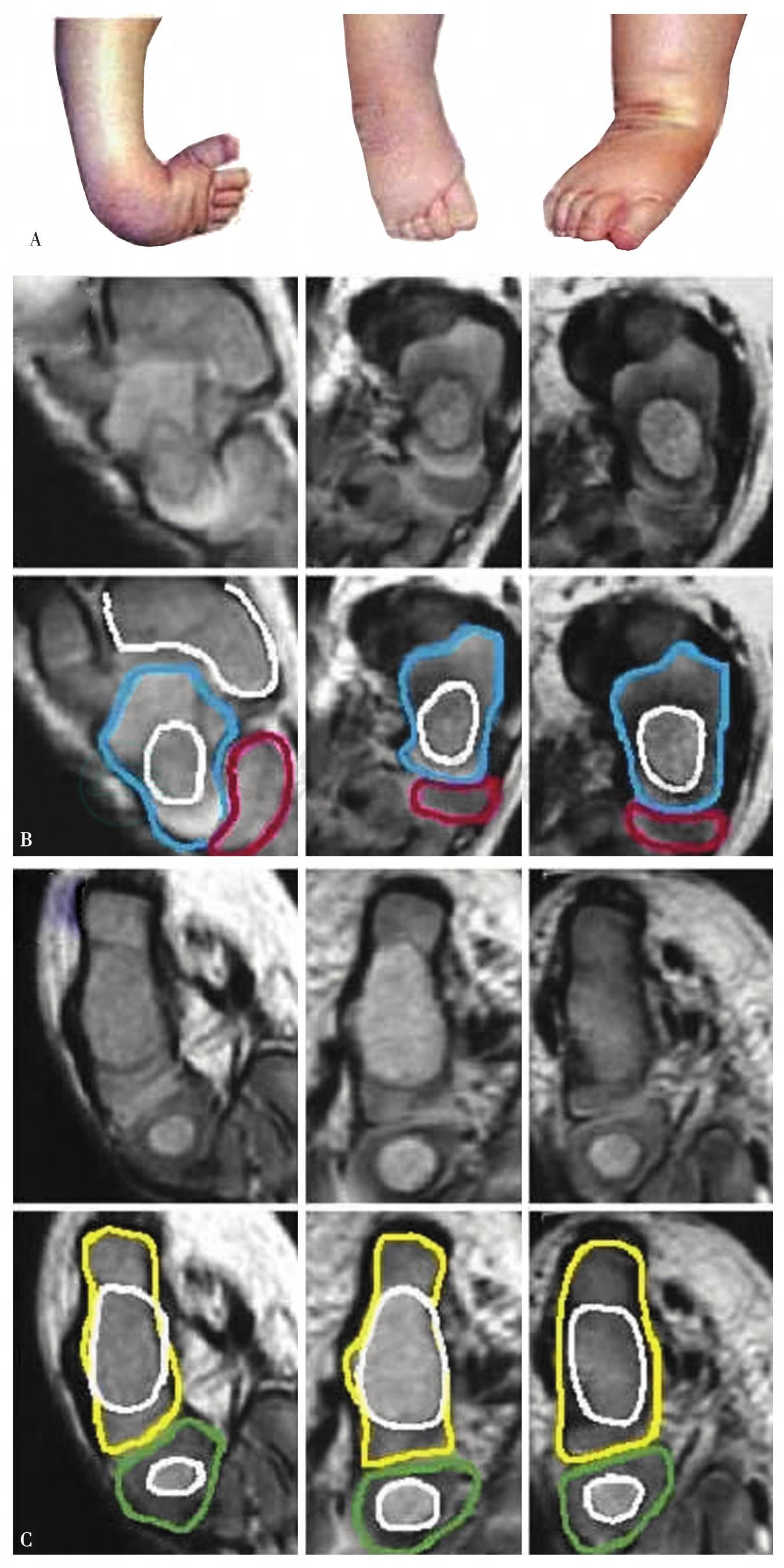
图8 MRI影像演示先天性马蹄内翻足非手术治疗的Ponseti方法中跗骨间关系变化
A.从左到右显示马蹄内翻足畸形逐渐矫正过程足外观的变化;B.与A相对应的时间段MR显示距舟关节,治疗前,舟骨(红线标记)位于距骨头(蓝色标记)的内侧面,图中从左至右显示石膏矫形过程中二者的关系逐渐恢复正常;C.与A相对应的时间段MR显示跟骰关节,在同一次石膏矫形过程中,骰骨(绿色标记)与跟骨(黄色标记)之间逐渐实现正确的排列关系
治疗应在出生后(5~7天)即开始,9个月之前,是治疗的最佳时期,9~28个月之间开始治疗仍可能矫正全部或大部畸形。采用Ponseti方法,一般需5次手法加石膏的治疗,必要时可再增加几次,内翻及足弓畸形就可得到矫正(图9)。多数病例需经皮跟腱切断术,以彻底纠正足跖屈畸形,然后进行最后一次石膏固定并保持3周。接着穿戴支具以维持获得的矫正。由于CTEV有复发的倾向,穿戴支具是预防畸形复发的重要措施。穿戴支具要求:前三个月每天穿戴23小时,然后主要在晚上睡觉和白天休息时穿戴直至4岁时。图9显示了支具的结构和在穿戴上的要求。需要特别强调的是,Ponseti方法所采用的支具是为了维持获得的矫正,而不是使畸形“获得”矫正。如果在行走年龄之后但在四岁之前开始穿戴支具,其方案与新生儿有所不同,要求在最初三个月每天穿戴16~18小时,然后逐渐减少到每天12小时直至5岁。如果在四岁之后开始穿戴支具,则要求每天穿戴支具12小时,持续一年时间。采用Ponseti方法治疗CTEV,患者坐、爬、站、走等大动作发育时期正处于夜间支具使用期,不影响白天大动作的发育及日常活动。畸形在学步前已纠正,可避免学步后出现跗骨及关节的继发改变。畸形复发是该治疗方法所面临的主要问题,目前的研究发现,没有严格按照要求穿戴支具是畸形复发的主要原因。还有一种情况是,在行走时表现出来的“摆动相”足内翻畸形,而在静态评估时形态良好,这主要是由于足踝内外侧肌力不平衡造成的,可以通过转移胫骨前肌到第三楔状骨获得内外肌力平衡进行治疗。根据作者的经验,这类的病例非常少,一般需要在2~4岁时进行认真的评估方才做出决定。
Ponseti方法治疗CTEV,在治疗前后的评价方面采用的是对临床表现的测量而不是根据影像学的表现。临床表现的测量,采用Pirani评分方法。Pirani评分方法主要用于评价2岁以下未经过手术治疗的先天性马蹄足畸形的程度。将畸形的程度记录下来,使得治疗人员(尤其是经验较少的)了解治疗的进展、跟腱切断术的指征和时机,让患者父母看到治疗的进步,还可以进行分组和结果的比较。Pirani评分将畸形的6个征象分别记分为:0 (正常),0.5(中度异常),1(严重异常)。如对中足评分(midfoot Score,MS)包括3个征象,即足外侧边缘弯曲、内侧皮肤皱折和距骨头覆盖,将中足畸形的数量按0-3分级。对后足评分(hindfoot Score,HS)包括3个征象,即后部皮肤皱折、僵硬马蹄足和足跟部空虚,将后足畸形的量按0-3分级。使用Ponseti方法治疗的每一只马蹄足,每周进行后足评分(HS)、中足评分(MS),获得总分,在进展图中标记这些数据,就可以看到治疗的效果。HS>1、MS<1和距骨被覆盖是跟腱切断术的指征。
Ponseti医生最初使用该方法治疗CTEV的病例主要为新生儿病例。目前临床实践中,存在大量延误治疗的病例,甚至采用传统手术治疗后畸形复发的病例。近年来,有相当多的研究报道采用Ponseti方法治疗大年龄、甚至广泛松解手术后畸形复发的病例取得较好的初期矫正结果。作者认为,对于处于生长发育阶段的儿童,Ponseti方法由于其利用组织受到力学因素刺激发生再生和重塑的原理,在实现畸形矫正的同时,所获得的组织质量较广泛软组织松解手术的病例为好,这也充分体现了目前倡导的微创治疗的理念。图10显示了经广泛软组织手术后畸形复发的病例采用Ponseti方法治疗取得良好的畸形矫治结果。

图9A 在Ponseti治疗法中,支具用于维持获得的矫正
无论采用什么材料制作,支具的基本构成是一样的,使足背伸约15度
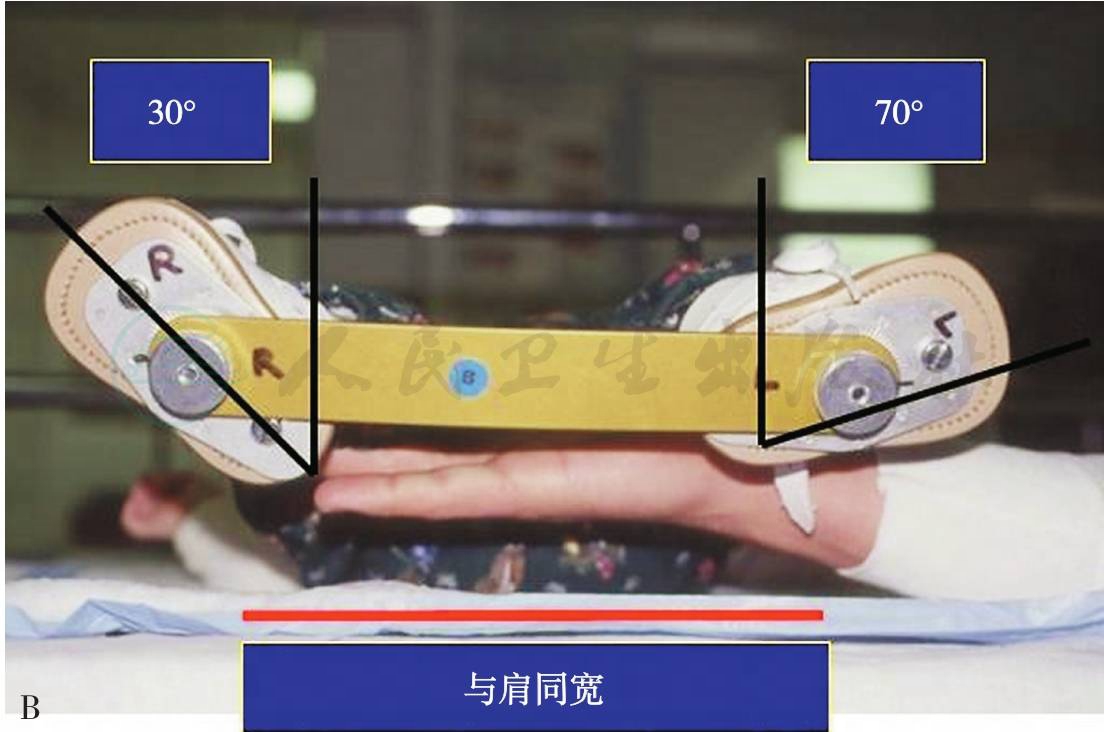
图9B 在Ponseti治疗法中,支具用于维持获得的矫正
连杆长度保持在与肩同宽,右侧为正常足,外展约30~50度,左侧为马蹄足矫治后,外展约60~70度(行走年龄之前)

图10 双侧CTEV,曾接受后内侧广泛软组织松解手术,术后畸形复发
A.该患者6岁时双足畸形情况;B.双足不能踏平,足踝僵硬,后内侧可见以往手术切口瘢痕;C.经Ponseti方法治疗(12次手法+石膏)后,站立位正面观;D.站立位后面观,畸形基本纠正,足能踏平
经过几十年的长期随访研究发现,Ponseti方法可以获得良好的远期功能结果,使患者获得有力量、灵活而无疼痛的足,更为重要的是,该方法简单、实用、有效并且治疗费用低廉,结合不同国家和地区的医疗卫生保健制度加以调整,可以适用于不同文化背景的国家和地区。但这种方法在手法操作的细节、跟腱延长术的采用、患者及其家长在支具治疗阶段的配合程度等方面尚存在许多问题,有待深入研究。
(二)手术治疗
手术治疗主要包括两类方法:
1.传统的、单纯广泛软组织松解手术矫正畸形,在部分病例需要结合骨性手术矫正畸形;
2.四维相矫治方法,即采用Ilizarov原理和技术逐渐矫正畸形,在部分病例需要结合有限的软组织和骨性手术。
虽然传统的、广泛软组织松解术在短期内改善了足的外观,但手术同时松解了肌腱、关节囊和韧带,这些组织术后将被大量的瘢痕组织替代,对足的发育、功能和稳定性产生影响。远期结果报道优良率非常低,许多医师已注意到该类患者在青少年时期即出现如行走疼痛、畸形复发和骨性关节炎等并发症。近年来,该类手术呈逐年下降趋势。
Ilizarov于1989年提出“牵伸性组织发生(distraction histogenesis)”的概念和理论,即缓慢牵伸活组织产生应力,可刺激和保持某些组织的再生和活跃生长,故亦称张应力原理。近年来,应用该理论和Ilizarov外固定装置矫治严重马蹄内翻足取得良好效果,该方法特别适用于大年龄的、畸形严重和僵硬的病例。由于足部和Ilizarov外固定装置同样具有三维结构,故可应用此装置进行足部固定并对足部畸形进行三维矫正(图11)。但本法与以往采用手术方法试图在一次手术过程中完成对畸形的三维矫正不同,它应用张应力原理增加了时间这个可调节的变量,为1mm/d,分为每次0.25mm的4个增量,在多个平面缓慢拉伸进行三维矫正,因而被称为四维相矫治方法。本法有两种方式:①非截骨法,适用于关节面对应关系正常、无固定骨骼畸形的病例;在年龄较小的病例,虽存在骨骼畸形,但足部诸骨仍有可能再塑形;②截骨牵伸法,适用于年龄大、有固定骨性畸形的病例。应用Ilizarov外固定装置做缓慢牵伸,并配合作U形切骨术或V形切骨术,从而实现马蹄内翻足各个畸形因素的矫正。如存在肌力不平衡,待畸形矫正后仍须建立肌力平衡。本法对严重马蹄内翻足矫正手术创伤小、效果好,且能较好地保持患足长度和功能。
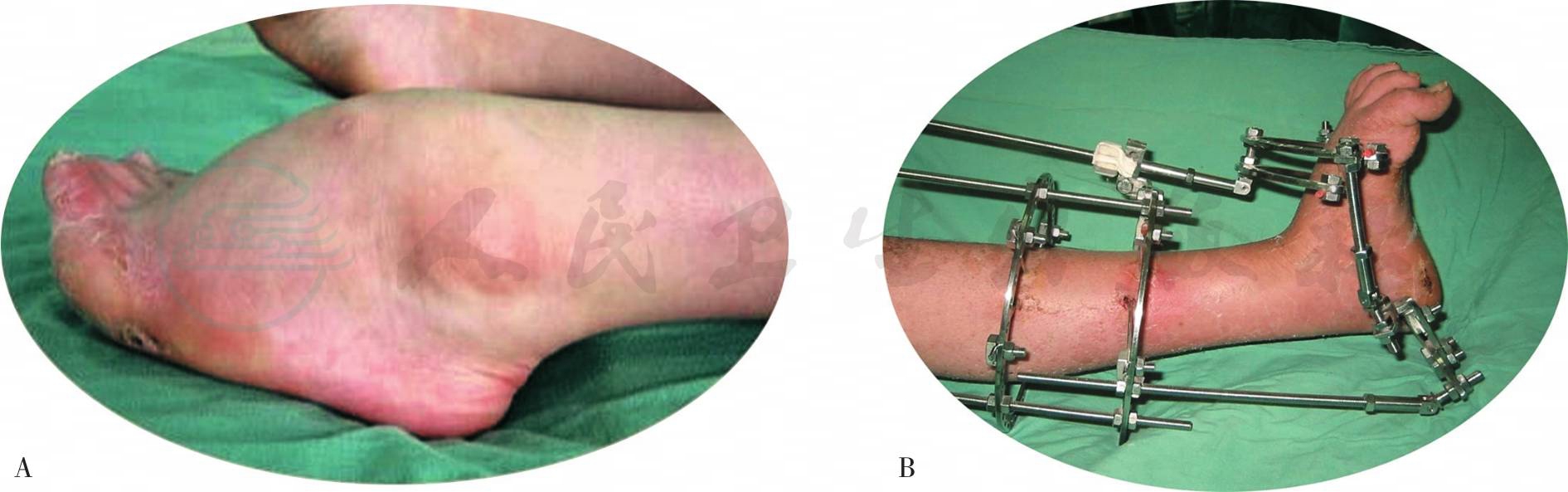
图11 对于畸形严重的马蹄内翻足病例,可采用“四维相”的矫治方法
A.治疗前畸形情况;B.治疗方案及畸形矫治情况
三关节融合术作为挽救性手术,适用于那些既往治疗失败、骨骼已成熟且行走疼痛的病例,在矫正畸形的同时获得能踏平而不疼痛的足。
先天性马蹄内翻足早期系统保守治疗有很好的治疗效果。强调早期诊断早期系统治疗是治愈先天性马蹄内翻足的关键。